
FrSky Redundancy Bus umożliwia zdublowanie połączenia RC oraz zasilania w modelu, dodatkowo udostępniając aż 16 tradycyjnych portów PWM do podłączenia serw. Dzięki takiemu rozwiązaniu połączenie RC między nadajnikiem a modelem będzie jeszcze bardziej stabilne, a ryzyko awarii zasilania odbiorników i serwomechanizmów ograniczone do minimum. Redundancy Bus wnosi nową jakość w niezawodność i ochronę szczególnie drogich modeli.

Przeznaczony jest do zapewnienia nieosiągalnego do tej pory poziomu ochrony modeli, szczególnie tych droższych i z silnikami spalinowymi (choć oczywiście można go wykorzystać także do modeli tańszych i elektrycznych).
Funkcjonalność
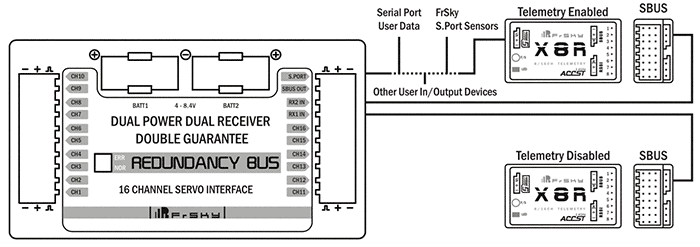
Redundancy Bus zapewnia redundantne (nadmiarowe) podłączenie źródeł zasilania oraz odbiorników RC. W przypadku awarii jednego elementu, Redundancy Bus bezprzerwowo przełączy się na element zapasowy.
- Równoległe podłączenie dwóch odbiorników (zabezpieczenie przed utratą zasięgu i awarią odbiornika)
- Równoległe podłączenie dwóch akumulatorów (zabezpieczenie przed awarią źródła zasilania)
- 16 konwencjonalnych portów PWM (do podłączenia serwomechanizmów)
- Zabezpieczenie przed przeciążeniem (oddzielnie dla każdego kanału PWM)
- Informacje o stanie krytycznych parametrów przez telemetrię Smart Port
Stabilizacja zasilania
Redundancy Bus NIE ZAPEWNIA stabilizacji napięcia zasilania. Przekazuje do odbiorników i serwomechanizmów takie napięcie, jakie otrzyma na swoich wejściach MPX (akceptowane napięcie 4.0~8.4V). Należy upewnić się, że podłączane odbiorniki i serwomechanizmy mogą pracować z podanym do Redundancy Bus poziomem napięcia zasilającego. W razie konieczności należy użyć odpowiednich BEC przed wejściami MPX Redundancy Busa.
Przykład:
Zasilamy Redundancy Bus bezpośrednio z dwóch pakietów LiPo 2S. Maksymalne napięcie wyniesie zatem 8.4V. Należy upewnić się, że posiadane odbiorniki i serwomechanizmy akceptują takie napięcie. Jeśli nie, należy pomiędzy pakiety LiPo a Redundancy Bus wstawić regulatory napięcia, oddzielnie dla każdego pakietu, np. do 5V lub 6V (głównie w zależności od posiadanych serwomechanizmów; odbiorniki FrSky akceptują zwykle napięcie zasilające do 10V).
Specyfikacja
- Akceptowane napięcie zasilające: 4.0~8.4V
- Ilość kanałów PWM: 16
- Temperatura pracy: -20 ~ 75°C
- Waga: 37g
- Wymiary: 77 x 43 x 22 mm
- Kompatybilność: moduły nadawcze serii X (XJT, Taranis X9D/Plus/X9E, Horus X12S, etc.)
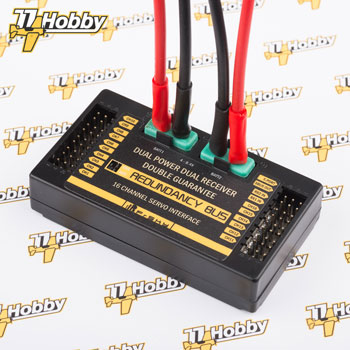
Opis portów
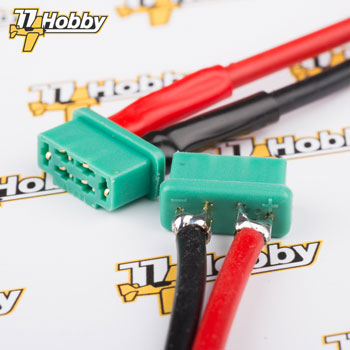
BATT1 & BATT2 - wejścia typu MPX do podłączenia źródeł zasilania. Akceptowane napięcie zasilające 4.0~8.4V (patrz paragraf Stabilizacja napięcia). Bieguny oznaczone na obudowie, tłoczonymi znakami plus i minus (zwykle także na wtykach MPX). Piny wtyków MPX wewnętrznie zgrupowane po trzy. Zalecany sposób lutowania przewodów na zdjęciu poniżej:
RX1 IN - wejście SBUS pierwszego odbiornika, służące jednocześnie do jego zasilania. Brak stabilizacji napięcia (patrz paragraf Stabilizacja zasilania).
RX2 IN - jak wyżej, ale dla drugiego odbiornika.
S.PORT - podłączenie telemetrii Smart Port jednego z odbiorników (drugi musi być zbindowany w trybie bez telemetrii, patrz paragraf o bindowaniu odbiorników).
SBUS OUT - wyście szyny SBUS do ewentualnego podłączenia innych urządzeń SBUS, np. serwomechanizmów pracujących bezpośrednio w trybie SBUS.
Wszystkie powyższe wyjścia są zabezpieczone przed przeciążeniem do 2.6A.
CH1~CH16 - konwencjonalne porty PWM do podłączenia serw cyfrowych i analogowych. Indywidualnie zabezpieczone przed przeciążeniem (patrz paragraf Zabezpieczenie przed przeciążeniem).
Zasilanie
Redundancy Bus może być zasilany z jednego lub dwóch akumulatorów w podanym w specyfikacji zakresie napięcia (do 8.4V, zatem w przypadku LiPo będzie to maksymalnie 2S - nie można użyć pakietów 3S). Aby w pełni wykorzystać możliwości Redundancy Busa, należy użyć dwóch pakietów, z dwoma oddzielnymi regulatorami napięcia (jeśli jest wymagana stabilizacja napięcia na określonym poziomie).
W przypadku użycia dwóch akumulatorów, należy upewnić się, że są one w stanie dostarczyć 15A w sposób ciągły oraz 90A chwilowo. W przeciwnym wypadku funkcja zabezpieczenia przed przeciążeniem może nie działać prawidłowo.
Jeśli napięcie obu pakietów jest takie same, Redundancy Bus będzie pobierał zasilanie jednocześnie z obu źródeł. Jeśli napięcie źródeł nie jest jednakowe, Redundancy Bus będzie korzystał ze źródła o wyższym napięciu, izolując źródło o napięciu niższym (jednak ciągle zapewniając ochronę ciągłości zasilania, przełączając się na drugi pakiet w razie potrzeby).
Dozwolone jest użycie źródeł zasilania różnego typu (np. LiPo i NiMH), o różnym napięciu nominalnym i różnej pojemności.
UWAGA:
Odbiorników i serwomechanizmów, podłączonych do Redundancy Busa, nie należy zasilać spoza Redundancy Busa.
UWAGA:
Redundancy Bus przeznaczony jest do zasilania odbiorników i serwomechanizmów. Nie należy przez niego podłączać odbiorników pobierających wiele amperów, np. silników. Do ich zasilania należy użyć oddzielnego źródła zasilania.
Zabezpieczenie przed przeciążeniem
Wszystkie szesnaście portów PWM do podłączania serwomechanizmów jest indywidualnie zabezpieczonych przed przeciążeniem. W przypadku wystąpienia przeciążenia na jednym z portów, nastąpi odłączenie tego portu od zasilania, podczas gdy zasilania pozostałych serwomechanizmów zostanie utrzymane.
Maksymalny dopuszczalny prąd (I hold) na każdym z portów CH1~CH16 wynosi 2.6A (przy temperaturze 25°C). W przypadku gdy natężenie prądu będzie wyższe niż 2.6A przez kilka sekund, zostanie aktywowane zabezpieczenie i dany port zostanie odłączony. Jeśli natężenie prądu wyniesie więcej niż 5A, dany port zostanie odłączony natychmiast.
Szczegółowa tabela opisująca możliwe obciążenia wyjść dostępna jest w instrukcji obsługi (np. dla 40°C prąd "I hold" wynosi 2.33A).
Obsługa telemetrii
Redundancy Bus działa jako czujnik telemetryczny Smart Port podłączony do jednego z odbiorników. Inne czujniki można podłączyć do tego samego odbiornika, do którego podłączony jest Redundancy Bus (czujniki Smart Port łączy się kaskadowo, jeden do drugiego, lub równolegle przy użyciu kabla typu Y).
Redundancy Bus wysyła informacje telemetryczne przez Smart Port do kompatybilnego odbiornika (obecnie wyłącznie odbiorniki serii X).
- Napięcie każdego źródła zasilania BATT1 & BATT2 (oddzielnie)
- Natężenie prądu pobierane ze źródła zasilania BATT1 & BATT2 (oddzielnie)
- Zużyta energia z każdego źródła BATT1 & BATT2 (oddzielnie)
- Wskazanie stanu odbiorników (failsafe, zgubiona ramka, odłączony, brak sygnału)

Dane przesyłane są w czasie rzeczywistym do kompatybilnego nadajnika RC.
Aby wykorzystać informacje przesyłane przez Redundancy Busa w Taranisie lub Horusie należy pracować pod kontrolą OpenTX serii 2.1 (OpenTX serii 2.0 nie będzie potrafił poprawnie zinterpretować odebranych danych).
Na podstawie przesyłanych danych można ustawić rozmaite alarmy, np. o wystąpieniu przeciążenia, o spadku napięcia jednego ze źródeł, etc. Polecamy lekturę artykułu Telemetria OpenTX 2.1.
Ustawienie szerokości ramki PWM
Szerokość (czas trwania) ramki PWM domyślnie ustawiona jest na 20ms. Istnieje możliwość synchronizacji czasu trwania ramki do sygnału odbiornika, w celu zwiększenia szybkości reagowania serwomechanizmów. Nie zaleca się zmiany szerokości ramki w przypadku używania serw analogowych.
Aby zmienić szerokość ramki z 20ms na synchronizowaną do sygnału odbiornika należy:
- Zewrzeć piny sygnałowe kanałów CH1 & CH2 (w Redundancy Bus)
- Podłączyć zasilanie do BATT1 oraz BATT2
- Zielona dioda będzie błyskać, sygnalizując że proces synchronizacji do odbiornika jest zakończony
- Zdjąć zworkę z pinów CH1 & CH2 i odłączyć oba źródła zasilania
Aby sprawdzić jaka szerokość ramki jest ustawiona (standardowa 20ms czy synchronizowana do odbiornika) należy podłączyć odbiornik(i) oraz zasilanie. Jeśli zielona dioda miga szybko, oznacza to, że synchronizacja do odbiornika jest aktywna. Jeśli dioda pali się światłem ciągłym, ramka sterująca ma standardową szerokość 20ms.
Bindowanie i podłączenie odbiorników
Do Redundancy Busa można podłączyć jeden lub dwa odbiorniki Smart Port, czyli obecnie wyłącznie odbiorniki serii X.
Oba odbiorniki binduje się do tego samego modelu w OpenTX, oba w trybie D16, ustalając żądaną ilość kanałów. Jeden z odbiorników należy zbindować bez telemetrii.
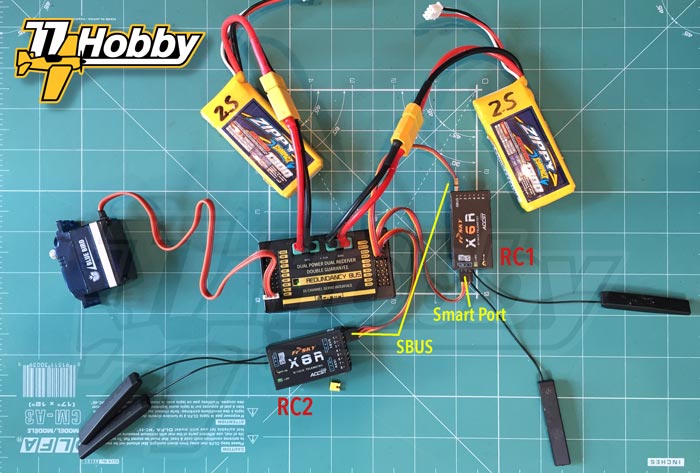
Odbiornik RC1
Może to być dowolny odbiornik serii X, wyposażony w porty SBUS oraz Smart Port (powinien mieć oba).
Bindowanie przeprowadzamy normalnie, tak jakbyśmy bindowali pojedynczy odbiornik.
Port SBUS odbiornika łączymy z portem RC1 IN Redundancy Busa. Podłączamy także Smart Port odbiornika do gniazda S.Port Redundancy Busa.
Odbiornik RC1 będzie odpowiedzialny za przekazywanie informacji telemetrycznych z powrotem do nadajnika RC. Awaria lub utrata zasięgu tego odbiornika spowoduje co prawda utratę telemetrii, ale nie spowoduje utraty kontroli nad modelem, jako że sygnały sterujące będą odbierane przez odbiornik RC2.
Odbiornik RC2
Drugi odbiornik jest opcjonalny, ale oczywiście jego instalacja jest wysoce zalecana.
Powinien być to również odbiornik serii X, ale musi być zbindowany w trybie bez telemetrii. Obecnie wyłącznie odbiorniki X8R oraz X6R mogą pracować w takim trybie.
Bindowanie przeprowadzamy na tym samym modelu w OpenTX, na którym wcześniej został zbindowany odbiornik RC1. W ten sposób oba odbiorniki zostaną przypisane do tego samego modelu i będą jednocześnie odbierały sygnały sterujące z nadajnika.
W dokumentacji odbiornika należy sprawdzić, w jaki sposób wyłączyć telemetrię. Dla odbiorników X8R/X6R należy na czas bindowania zewrzeć piny sygnałowe kanałów CH1&CH2 albo CH3&CH4, w zależności który zakres kanałów ma być przekazywany na porty PWM odbiornika (w przypadku korzystania z Redundancy Busa nie ma znaczenia, czy zewrzemy CH1&CH2, czy CH3&CH4). Po bindowaniu zworkę należy zdjąć.
Po zbindowaniu obu odbiorników do jednego modelu, oba odbiorniki będą przesyłały informacje sterujące do Redundancy Busa. Redundancy Bus będzie je konsolidował i przekazywał spójną informację na swoje porty PWM. Tylko jeden odbiornik będzie przekazywał informacje telemetryczne.
Redundancy Bus był długo oczekiwanym produktem FrSky. Zapewnia ochronę przed awarią zasilania odbiorników i serwomechanizmów, przed awarią odbiornika oraz przed utratą zasięgu. Oczywiście w przypadku awarii jednego z elementów należy niezwłocznie zawrócić model i wylądować. Dzięki zastosowaniu Redundancy Bus, nawet w przypadku awarii pojedynczego elementu, lądowanie ma duże szanse odbyć się w sposób normalny, nie w trybie awaryjnym.