
Kanały RC, PWM, PPM, CPPM, PPMSUM, SBUS, Smart Port, RSSI i więcej. Czasy, kiedy odbiorniki RC miały wyłącznie porty PWM do których przyłączało się serwomechanizmy, dawno minęły. W niniejszym artykule przyglądamy się nieco bliżej różnym typom portów spotykanych obecnie w odbiornikach… i nie tylko.
Jako autoryzowany dealer FrSky będziemy się skupiać na specyfice rozwiązań FrSky, ale wiele informacji zawartych w tym artykule jest uniwersalnych, przy czym oczywiście piszemy o nich w kontekście hobby modelarskiego.
Kanały RC
Każdy link radiowy RC może przenosić określoną ilość kanałów, czyli niezależnych od siebie informacji o położeniu drążków i przełączników aparatury RC (nadajnika). To uproszczenie, bo kanały mogą zawierać tak naprawdę dowolną wartość, niekoniecznie o położeniu przełączników czy drążków aparatury.
Na początek przyjmijmy, że każdy kanał może przyjmować wartości od -100%, przez 0%, do +100% – gdzie zero odpowiada pozycji neutralnej kanału (np. drążek w pozycji neutralnej, czy 3-pozycyjny przełącznik w pozycji środkowej). Przesuwanie drążka od neutrum do pozycji skrajnych będzie powodowało proporcjonalną zmianę wartości kanału, aż do wartości skrajnych (-100% albo +100%, w zależności od kierunku ruchu drążka).
Aktualne wartości kanałów są w sposób ciągły transmitowane do odbiornika, który je odbiera i przyporządkowuje do swoich portów wyjściowych, umożliwiając np. sterowanie przyłączonymi serwomechanizmami. W przypadku tradycyjnego samolotu potrzebujemy co najmniej 4 kanałów (przepustnica, lotki, ster kierunku, ster wysokości) i tylu kanałowe były popularne aparatury jeszcze kilka lat temu (zwykle 4 lub 6-kanałowe).
Współczesne nadajniki pracujące w cyfrowych systemach 2.4GHz potrafią obsługiwać znacznie więcej kanałów. System FrSky ACCST w trybie D16 obsługuje ich aż szesnaście. Przy czym nie oznacza to, że musimy używać wszystkich dostępnych kanałów. Wręcz zaleca się, aby nie wysyłać kanałów nie używanych w danym modelu. Ilość wysyłanych kanałów można zwykle konfigurować w oprogramowaniu systemowym aparatury RC, np. w OpenTX.
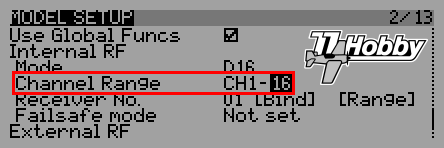
rys 1: Ustawiania zakresu kanałów w OpenTX.
Analogicznie ilość kanałów, które potrafi obsłużyć nadajnik, nie determinuje ilości urządzeń wejściowych (drążków, przełączników) aparatury RC. Może być ich więcej lub mniej, a za ich przypisanie do kanałów odpowiada oprogramowanie systemowe nadajnika. W zależności od producenta mamy mniej lub więcej swobody w przypisywaniu kanałów. OpenTX, pod kontrolą którego pracują aparatury FrSky, pozwala na w pełni dowolne zarządzanie przypisywaniem, kolejnością i miksowaniem kanałów.
Może zdarzyć się, że odbiornik lub kontroler lotu będzie oczekiwał, że kanały będą przesyłane przez nadajnik w określonej kolejności. Jest to bardzo częste np. w przypadku odbiorników ze stabilizacją, gdzie niezwykle istotne jest, do których portów podłącza się serwomechanizmy konkretnych płaszczyzn sterujących.
Określenie kolejności kanałów często podawane jest jako zlepek pierwszych liter angielskojęzycznych nazw głównych kanałów samolotu o tradycyjnym rodzaju usterzenia. Są to Throttle (przepustnica), Elevator (ster wysokości), Rudder (ster kierunku) oraz Ailrons (lotki). Zatem TERA oznacza, że odbiornik oczekuje kanałów w następującej kolejności:
- Throttle
- Elevator
- Rudder
- Ailrons
Analogicznie można opisać dowolny inny układ, np. AERT, RETA, etc.
Kanały można także miksować, tj. więcej niż jedno wejście jest brane pod uwagę przy generowaniu jednego kanału lub odwrotnie, z jednego wyjścia generowane są dwie różne wartości kanałów. Dobrymi przykładami są np. dwa przełączniki, które użytkownik musi jednocześnie przełączyć, aby zadziałał kanał sterujący awaryjnym wyłącznikiem silnika (tzw. kill switch) albo takie zmiksowanie drążka lotek, aby jedna lotka wychylała się bardziej niż druga, pracująca na dodatek w przeciwną stronę.
Tradycyjne aparatury oferują różne układy usterzenia, kolejność kanałów, czy zestawy predefiniowanych mikserów. W nadajnikach FrSky, pracujących pod kontrolą OpenTX, nie ma takich ograniczeń. Można skonfigurować dowolny układ, kolejność kanałów, zmiksować wszystko ze wszystkim, np. wartość RSSI (patrz niżej) może być wejściem dla jakiegoś kanału.
W rzeczywistości kanały przyjmują określone wartości PWM, definiowane przez czas trwania impulsu napięcia.
Konwencjonalne porty PWM
Porty PWM były w modelarstwie od zawsze, dlatego określamy je jako „konwencjonalne”, w odróżnieniu od portów CPPM, czy SBUS, które są w użyciu stosunkowo od niedawna.
Zwykle do portów PWM przyłącza się serwomechanizmy. Rzadziej łączy się przy ich pomocy odbiornik z kontrolerem lotu. Ich wadą jest konieczność prowadzenia oddzielnego kabla od każdego portu odbiornika, do każdego urządzenia wykonawczego (serwomechanizmu lub wejściowego portu PWM kontrolera lotu). Bywa to kłopotliwe, szczególnie przy dużej ilości kanałów.
Sygnał PWM jest sygnałem analogowym, w którym informacja o aktualnej wartości danego kanału przekazywana jest jako szerokość impulsu napięcia w czasie. Taki sposób przekazywania informacji nazywa się modulacją szerokości impulsu (ang. Pulse Width Modulation). „Szerokość” impulsu oznacza czas jego trwania.
Impuls PWM jest chwilową zmianą napięcia z 0V do jakiejś umownej wartości napięcia – w przypadku FrSky jest to 3.3V. Typowy przebieg PWM wygląda podobnie jak na rysunku:
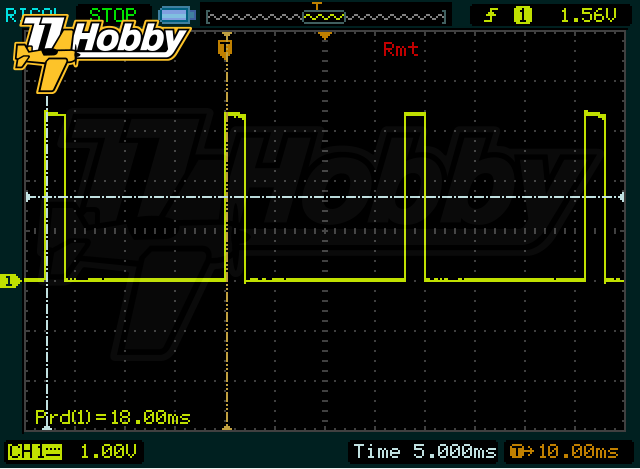
rys. 2
rys. 3
Jak czytać przebiegi na wyświetlaczu oscyloskopu?
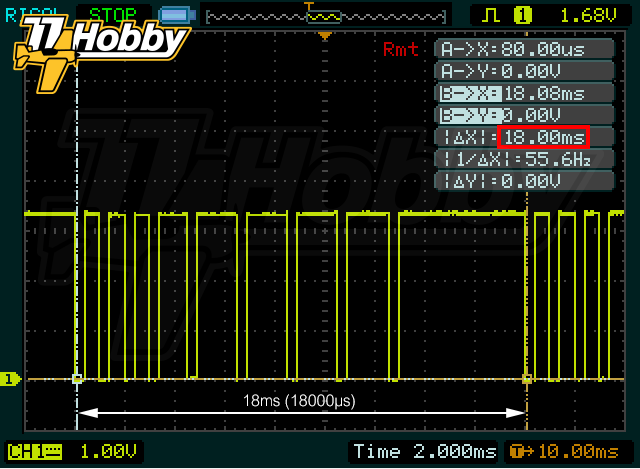
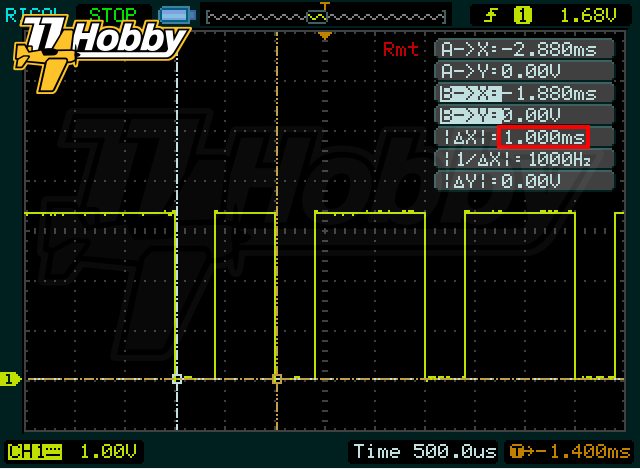
Ekran oscyloskopu podzielony jest liniami pionowymi i poziomymi (kropkowane linie). W osi pionowej reprezentowane jest napięcie, a w osi poziomej czas. W przykładach powyżej jedna podziałka pionowa odpowiada 1V („CH1 1.00V” u dołu ekranu). Natomiast jedna podziałka pozioma trwa 5ms („Time 5.000ms”). Widać, że impulsy w pionie mają ok. trzy i 1/3 podziałki, co odpowiada napięciu 3.3V (jedna podziałka pionowa = 1V). W poziomie natomiast odległość między zboczami narastającymi kolejnych impulsów to ok. 3 i 2/3 podziałki, co odpowiada 18ms (jedna podziałka pozioma = 5ms). Określenie „około” nie jest zbyt dokładne, dlatego na obu rysunkach widać dokładne czasy zmierzone przy użyciu kursorów oscyloskopu. Warto także wiedzieć, że 1ms (milisekunda) = 1000µs (mikrosekund).
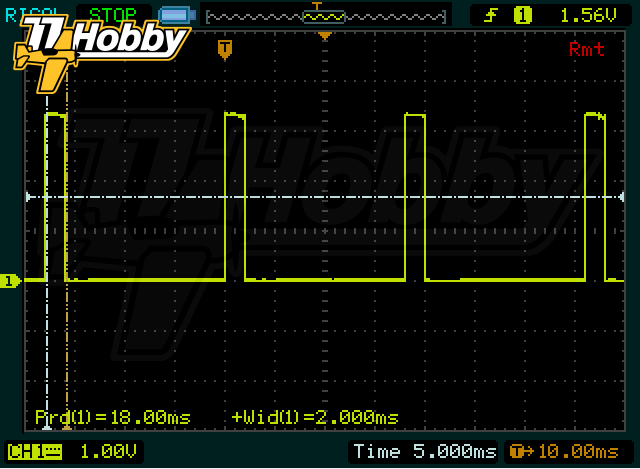
Na rysunkach 2 i 3 widać przebieg PWM wygenerowany przez odbiornik FrSky D4R-II, gdzie co 18ms pojawiają się impulsy, których szerokość (czas trwania) zależy od wartości danego kanału, a napięcie każdego impulsu to 3.3V. W tym przykładzie impulsy mają szerokość 2000µs (czyli 2ms), co w procentach odpowiada +100% wartości kanału.
Jeśli wartość kanału zacznie się zmieniać, np. w wyniku poruszania drążkiem lub zmiany położenia przełącznika, zmieni się szerokość impulsu, ale nie zmieni się okres, co jaki impulsy są generowane. Zatem będą one nadal generowane co 18ms (wartość prawdziwa dla FrSky, inni producenci mogą stosować inną częstotliwość generowania impulsów), ale zmieni się szerokość impulsów. Aktualna wartość szerokości impulsu jest interpretowana przez elementy wykonawcze, np. przez serwomechanizm, który wychyli się proporcjonalnie do szerokości odbieranego impulsu.
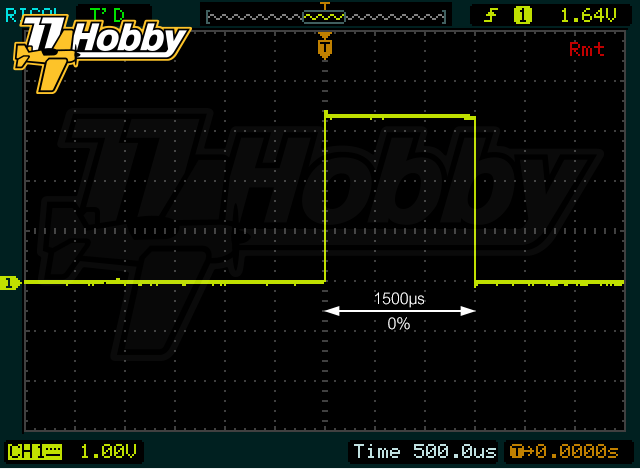
Typowa szerokość impulsu PWM używanego w modelarstwie waha się w zakresie od 1000µs do 2000µs, gdzie neutrum (0%) wypada przy 1500us, a wartości 1000us i 2000us to odpowiednio -100% oraz +100% – skrajne możliwe wartości kanału.
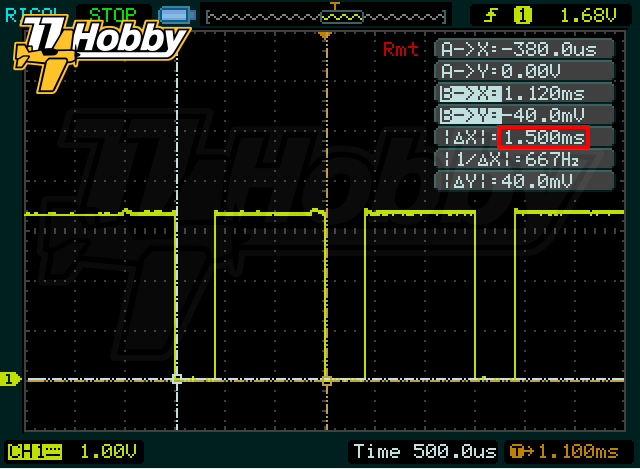
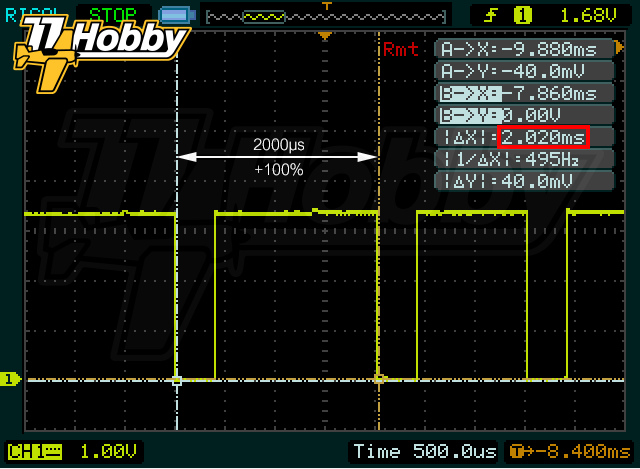
Na rysunkach 4, 5 oraz 6 widać pojedynczy impuls PWM o różnych szerokościach (czasach trwania), odpowiadających wartością kanałów -100%, 0% i +100%.
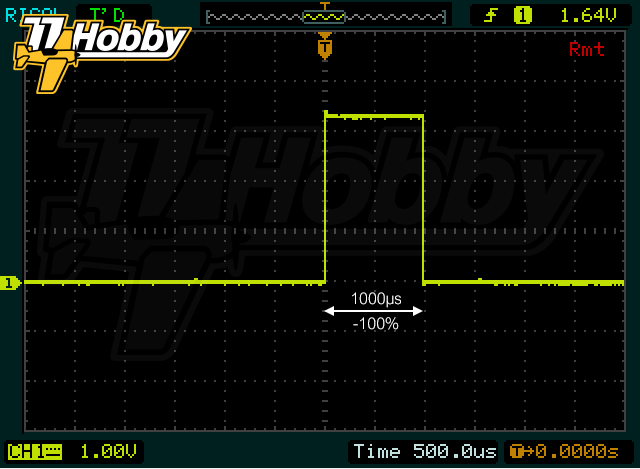
rys. 4
rys.5
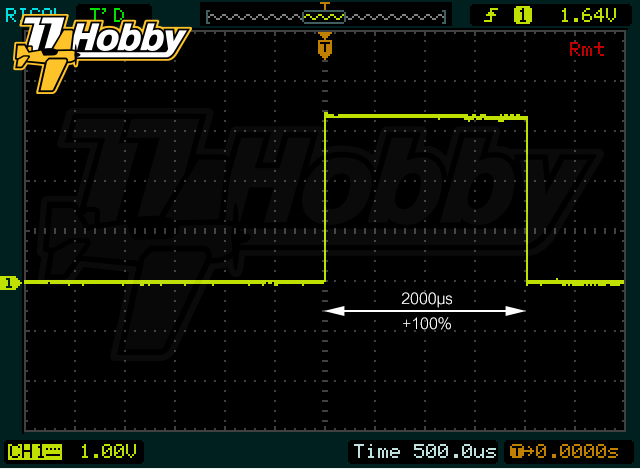
rys. 6
We wszystkich trzech rysunkach pozioma podziałka oscyloskopu została ustawiona na 500µs, dzięki czemu dokładnie widać prezentowane wartości. Oczywiście szerokość impulsu może zmieniać się płynnie i przyjmować dowolne wartości z zakresu 1000-2000µs, nie tylko co 500µs.
W praktyce spotyka się pewnie niedokładności, np. faktyczny zakres wypada od 980µs do 2050µs. Niektórzy producenci stosują także nieznacznie inne wartości graniczne. Większość aparatur RC pozwala jednak na precyzyjne ustawiania limitów pracy kanałów. W OpenTX ustawia się to w zakładce OUTPUTS konfiguracji każdego modelu.
Czasem używa się wartości spoza standardowego zakresu celowo, np. w celu aktywacji funkcji failsafe niektórych kontrolerów lotu. Zwykle działa to w ten sposób, że w odbiorniku, w przypadku aktywowania failsafe, jeden z kanałów ustawiany jest na wartość np. 970µs. Jeśli kontroler lotu wykryje wartość mniejszą niż np. 980µs – co nie zdarzy się w trakcie normalnej pracy odbiornika – aktywuje własne procedury failsafe, np. funkcję autonomicznego powrotu do miejsca startu.
PWM jest używany w modelarskim świecie od długiego czasu i zapewne prędko nie zostanie zupełnie wyparty, szczególnie w modelarstwie tradycyjnym, np. lotniczym. Jednak jego największa wada – konieczność stosowania odrębnych przewodów dla każdego kanału – powoduje, że jest on coraz częściej zastępowany innymi rozwiązaniami.
PPM / CPPM / PPMSUM
PPM – czyli z angielskiego Pulse Position Modulation, to również sygnał analogowy, ale przekazujący jednym przewodem informacje o wartościach kilku kanałów. Implementacja FrSky pozwala na przekazywanie przez PPM do 8 kanałów.
PPM bywa często nazywany CPPM (Combined PPM) lub PPMSUM.
W uproszczeniu jest to kilka sygnałów PPM, następujących po sobie, zgrupowanych w tzw. ramkę, oddzielonych od kolejnych ramek specjalnym znacznikiem (markerem). Markerem tym jest impuls o szerokości większej od zwykłych impulsów, przenoszących informacje o kanałach.
rys. 7: Ramka CPPM wygenerowana przez odbiornik FrSky D4R-II.
Szerokość ramki do 18ms. Czyli taka sama jak okres dla sygnału PWM, ale na przebiegu oscyloskopu widać osiem impulsów (kanałów): pierwsze trzy ustawione na 1000µs, kanał trzeci na 1500µs, a cztery ostatnie ustawione na 2000µs. Ostatni impuls, znacznie szerszy od poprzedzających, jest znacznikiem końca ramki, sygnalizując jednocześnie początek ramki następnej.
Rysunki 8, 9 oraz 10 pokazują „powiększenie” pierwszego impulsu, występującego zaraz po impulsie-znaczniku, w trzech stanach: 1000µs, 1500µs i 2000µs – analogicznie jak pokazywaliśmy to dla sygnału PWM, czyli przy podziałce czasu ustawionej na 500µs.
rys. 8
rys. 9
rys. 10
Drobna różnica względem sygnału PWM jest taka, że szerokość określająca wartość danego kanału nie jest szerokością samego impulsu, ale szerokością między zboczami opadającymi kolejnych impulsów. Nie ma to większego znaczenia dla zrozumienia działania CPPM, ale warto o tym wspomnieć dla porządku.
Niestety w standardowej implementacji FrSky szerokość (czas trwania) ramki CPPM, wynoszący 18ms, jest zbyt krótki. FrSky pisze w dokumentacji swoich odbiorników serii D, żeby nie używać wszystkich ośmiu kanałów ustawionych na maksymalne wartości 2000µs (czyli 2ms). Poniżej wyjaśniamy, dlaczego:
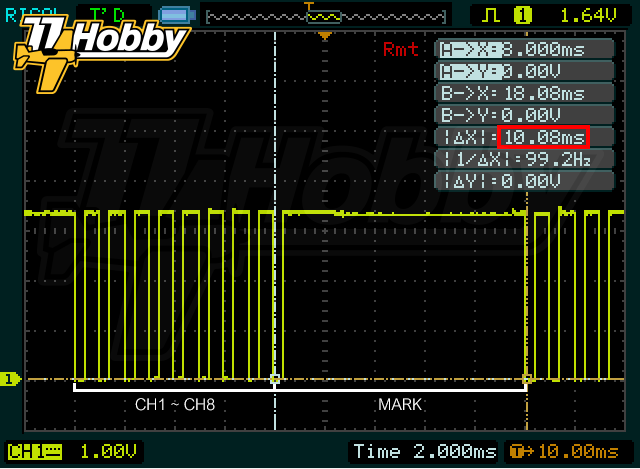
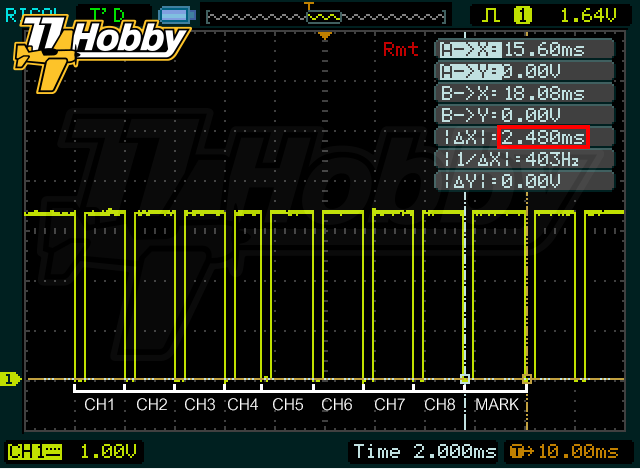
rys. 11: Wszystkie osiem kanałów (CH1 ~ CH8) ustawione na minimalną wartość 1000µs. Impuls-znacznik (MARK) trwa w takim przypadku aż 10ms, czyli bez problemu odróżnia się od impulsów kanałów.
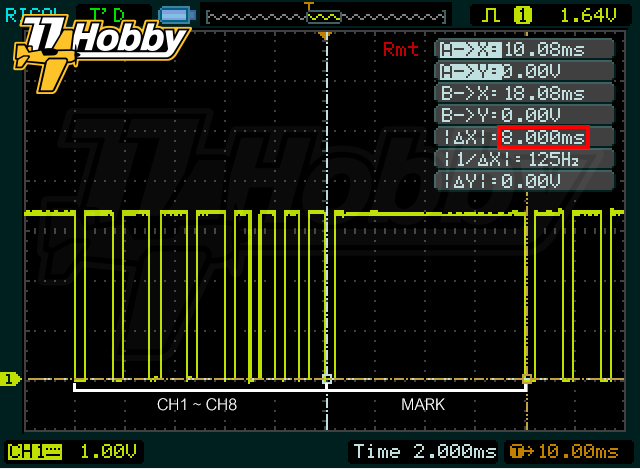
rys. 12: Impulsy kanałów (CH1 ~ CH8) ustawione na różne wartości, oczywiście z zakresu 1000-2000µs. Impuls MARK jest ciągle bez problemu odróżnialny, o bezpiecznej szerokości 8ms.
rys: 13: Sytuacja skrajna. Wszystkie impulsy kanałów mają wartości zbliżone do 2000µs, tylko kanał CH4 ma wartość mniejszą. Impuls MARK jest w takiej sytuacji jeszcze ciągle rozpoznawalny – jego szerokość to 2480µs. Jednak gdyby impuls CH4 także zwiększył się do wartości 2000µs, wtedy MARK nie byłby szerszy od pozostałych i odbiornik nie byłby w stanie rozpoznać, gdzie zaczynają i kończą się kolejne ramki. Najprawdopodobniej kolejność rozpoznawania kanałów została by zakłócona.
Problem zbyt krótkiej ramki 18ms można także łatwo udowodnić teoretycznie: 8 x 2ms = 16ms. Zatem w ramce trwającej 18ms na impuls-znacznik (MARK) pozostaje tylko 2ms, co nie pozwala na odróżnienie znacznika od pozostałych impulsów.
W praktyce ustawienie wszystkich kanałów na maksymalne wartości jest mało prawdopodobne, ale trzeba być świadomym problemu i zapobiegać powstaniu takiej sytuacji. Rozwiązań jest kilka:
- Transmitować mniejszą ilość kanałów (do ustawienia w OpenTX, patrz wyżej paragraf o kanałach).
- Zapewnić taką konfigurację ustawień w modelu, aby nigdy nie wystąpiła sytuacja, że wszystkie kanały będą naraz ustawione na 2000µs.
- Zwiększyć długość ramki CPPM.
Dla odbiorników serii D FrSky udostępnia firmware, w którym długość ramki CPPM została zwiększona do 27ms. Rozwiązuje to problem zbyt krótkiej ramki, jednak kosztem zwiększenia opóźnienia, gdyż transmisja pełnej ramki zajmuje o 9ms dłużej. Firmware 27ms można ściągnąć ze stron FrSky.
Dla odbiorników serii X (np. X4R / X4RSB), długość ramki CPPM została standardowo wydłużona do 27ms.
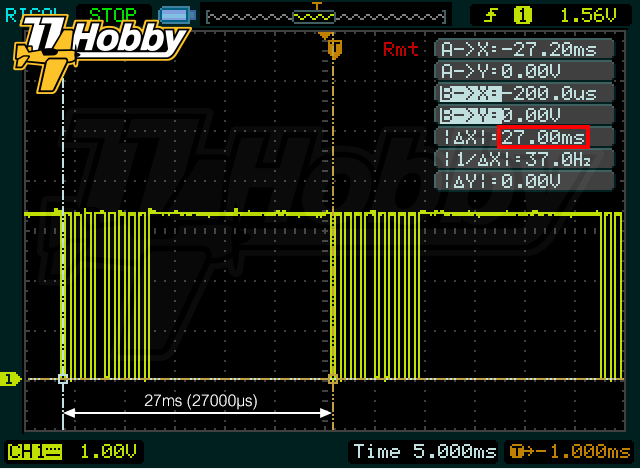
rys. 14: Przebieg CPPM wygenerowany przez odbiornik FrSky X4RSB, o szerokości ramki 27ms.
SBUS
SBUS jest odpowiedzią na wszystkie bolączki CPPM. Tak samo jak CPPM, SBUS umożliwia przekazywanie informacji o wielu kanałach jednym przewodem. Jest to protokół cyfrowy, więc pokazywanie jego przebiegów na oscyloskopie nie ma sensu.
SBUS jest szyną szeregową UART, przy czym FrSky stosuje odwróconą polaryzację sygnału. Niektóre kontrolery lotu potrafią taki sygnał odczytywać bezpośrednio i programowo odwracać, inne będą wymagały inwertera sygnału.
Do kontrolerów lotu zwykle wysyła się wszystkie używane kanały, które są następnie obsługiwane przez oprogramowanie kontrolera. Do połączenia odbiornika z kontrolerem wystarczy jeden przewód, zwykle trzy żyłowy (sygnał, zasilanie, masa), który jednocześnie zasila odbiornik z kontrolera.
Inne urządzenia SBUS (np. serwomechanizmy czy dekodery CPPM/SBUS) należy ustawić na odpowiedni numer kanału, który zostanie do nich przypisany. Przykładowy schemat podłączenia urządzeń SBUS pokazany jest na rysunku 15.
W przypadku serwomechanizmów SBUS po ustawieniu na konkretny numer kanału, będą one reagowały na zmiany wyłącznie na tym kanale.
Numer kanału dla urządzenia SBUS ustawia się przy pomocy FrSky SCC (ang. Servo Channel Changer). Nazwa sugeruje możliwość ustawiania numeru kanału dla serwomechanizmów, ale SCC potrafi konfigurować nie tylko serwa.
FrSky CPPM/SBUS dekoder jest urządzeniem, które zamienia sygnał CPPM lub SBUS (sam wykrywa rodzaj sygnału wejściowego) na cztery konwencjonalne porty PWM. W dekoderze ustawia się (także przy pomocy FrSky SCC) numery kanałów, które mają być przypisane do portów PWM dekodara.
W razie potrzeby można przypisać kilka urządzeń SBUS do jednego kanału. Będą one reagowały w taki sam sposób na zmiany występujące na tym kanale.
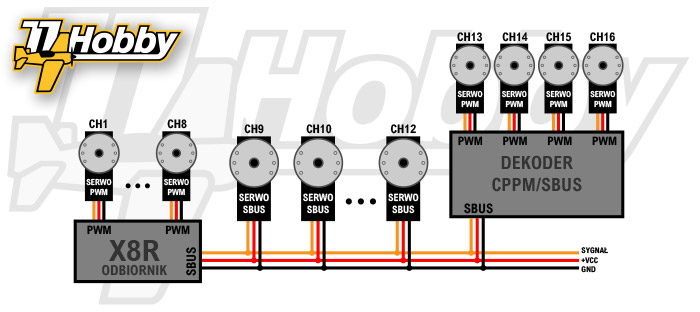
rys. 15: Przykładowy schemat podłączenia tradycyjnych serwomechanizmów (bezpośrednio i przez dekoder SBUS/CPPM) oraz serwomechanizmów SBUS do popularnego odbiornika FrSky X8R.
W podanym przykładzie do X8R zostało podłączonych 16 serwomechanizmów:
• kanały 1-8: osiem tradycyjnych serw podłączonych do portów PWM odbiornika
• kanały 9-12: cztery serwomechanizmy SBUS, każdy oddzielnie przypisany do swojego kanału
• kanały 13-16: dekoder CPPM/SBUS, konwertujący cztery kolejne kanały (licząc od 13 włącznie), na swoje porty PWM, do których przyłączone są tradycyjne serwa
Jeśli nie mamy serw SBUS, a potrzebujemy podłączyć 16 serwomechanizmów, można użyć dwóch dekoderów – jeden ustawiony na kanały 9-12, drugi na kanały 13-16 – do których można podłączyć tradycyjne serwomechanizmy, razem aż osiem. W połączeniu z ośmioma portami PWM samego odbiornika X8R daje 16 konwencjonalnych serwomechanizmów podłączonych do jednego odbiornika.
Oczywiście odbiornik X8R został podany przykładowo. Według podobnego schematu można podłączyć każdy odbiornik FrSky wyposażony w port SBUS.
Jeśli chodzi o połączenie elektryczne, urządzenia SBUS łączy się równolegle. Można do tego użyć np. wielokrotnego kabla typu „Y” lub przyłączać się do szyny, jak na rysunku 15. Minimalne połączenie z odbiornikiem to linie sygnału i masy. Zasilanie można prowadzić oddzielnie – np. w przypadku dużych serwomechanizmów – z wysoko wydajnego prądowo, dedykowanego źródła zasilania. Zagadnienie zasilania instalacji w modelu nie jest jednak przedmiotem niniejszego artykułu i nie będzie tutaj szerzej omawiane.
W przypadku FrSky protokół SBUS potrafi przenosić informacje o maksymalnie 16 kanałach, a przesłanie jednej ramki (czyli wszystkich 16. kanałów) trwa tylko 9ms – dwa razy szybciej niż ramki CPPM 18ms, i aż trzy razy szybciej niż ramki 27ms. Biorąc pod uwagę, że niektóre kontrolery lotu odczytują po dwie, trzy ramki i dopiero uśrednione wyniki są przez nie przetwarzane – daje to jeszcze większe oszczędności czasu reakcji. Dodatkowo SBUS posiada wbudowane w protokół sprawdzanie i korektę błędów, co pozwala na ograniczenie lub wyeliminowanie uśredniania. W skrajnym przypadku kontroler może odczytywać jedną ramkę SBUS 9ms, a dla CPPM aż trzy ramki 27ms (różnica opóźnień 9ms vs 81ms).
SBUS jest pod każdym względem lepszy niż CPPM. Jest szybszy, bardziej niezawodny, odsługuje więcej kanałów i umożliwia znaczące ograniczenie okablowania modeli.
Smart Port
Smart Port (SPort) – w odróżnieniu od PWM, CPPM czy SBUS – jest protokołem stosowanym wyłącznie przez FrSky.
Wszystkie nowe produkty FrSky – odbiorniki serii X, nadajniki XJT / Taranis / Horus, czujniki Smart Port – wykorzystują ten port do wzajemnej komunikacji, zwykle do przekazywania informacji telemetrycznych. Port ten jest również używany do uaktualniania firmware oraz do konfiguracji urządzeń Smart Port.
Smart Port jest protokołem transmisji szeregowej, dlatego – podobnie jak w przypadku SBUS – pokazywanie przebiegów na oscyloskopie jest bezcelowe.
Poniższe dwa artykuły Warsztatu FrSky opisują metody uaktualniania firmware:
- Uaktualnienie firmware urządzeń Smart Port przez OpenTX 2.1
- Uaktualnienie firmware urządzeń Smart Port
Czujniki Smart Port łączy się z odbiornikiem kaskadowo. Większość czujników posiada dwa porty SPort, co umożliwia połączenie pierwszego czujnika do odbiornika i kolejnych nawzajem do siebie (patrz rysunek 16). Elektrycznie jest to jednak zwykłe połączenie równoległe, więc w razie potrzeby można także zastosować kable rozgałęziające typu „Y”.
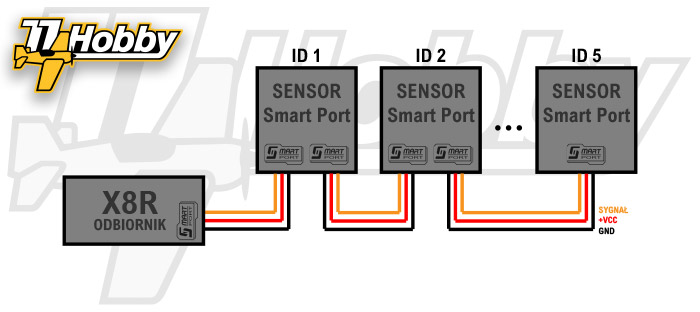
rys. 16: Przykładowy schemat podłączenia kilku czujników Smart Port do odbiornika X8R. Czujników może być wiele, ale każdy musi mieć unikalny ID.
Urządzenia Smart Port muszą posiadać unikalny identyfikator (ID), tak by mogły być rozpoznane przez OpenTX i odpowiednio adresowane w trakcie transmisji danych. Domyślny identyfikator poszczególnych urządzeń jest nadawany fabrycznie i nie wymaga zmiany. Jednak jeśli chce się przyłączyć dwa takie same urządzenia Smart Port w jednym modelu (np. dwa czujniki napięcia akumulatorów FLVSS do jednego odbiornika), należy samemu zadbać o nadanie unikalnego ID. Ze stron FrSky można pobrać odpowiedni program – S.Port Tool (rysunek 17). Trzeba także posiadać jeden z adapterów używanych do uaktualniania firmware i opisywanych w artykule Uaktualnienie firmware urządzeń Smart Port.
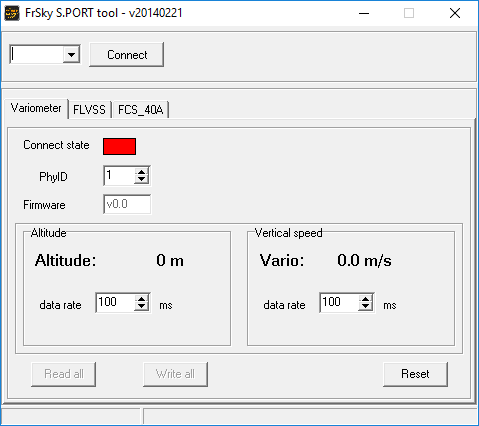
rys 17: S.Port Tool – narzędzie FrSky do ustawiania ID urządzeń Smart Port
Po instalacji czujników (sensorów) w modelu i podłączeniu ich do odbiornika, należy wykryć podłączone sensory w OpenTX, a następnie skonfigurować ich wyświetlanie, odczytywanie komunikatami głosowymi, alarmy, etc. Konfigurację telemetrii opisujemy szczegółowo w artykule Telemetria OpenTX 2.1.
RSSI
Większość odbiorników FrSky to odbiorniki telemetryczne. Oznacza to, że odbiornik może transmitować z powrotem do aparatury RC informacje z rozmaitych czujników, także wewnętrznych wbudowanych w odbiornik. Wszystkie odbiorniki telemetryczne FrSky wysyłają dane o napięciu własnego zasilania oraz wskaźnik siły odbieranego sygnału RSSI (ang. Received Signal Strength Indicator).
RSSI nie jest parametrem wyrażonym w procentach, czasem przyjmuje wartości powyżej 100. RSSI nie jest mierzony w skali liniowej, a logarytmicznej, i w związku z tym podawane wartości wyrażane są w dB. Zmiana RSSI o 6dB oznacza podwójną zmianę wskazania siły sygnału, zmiana o 12dB poczwórną, o 18db razy osiem, itd.
Na podstawie odbieranego przez aparaturę RC parametru RSSI, można ustawić alarmy o pogarszającej się jakości połączenia. Standardowo OpenTX ma zdefiniowane dwa progi alarmów głosowych: niski poziom sygnału (ang. RF signal low) i krytyczny poziom sygnału (ang. RF signal critical). Potem następuje utrata telemetrii (ang. telemetry lost) i dopiero na samym końcu faktyczna utrata kontroli nad modelem. Oczywiście już przy pierwszym ostrzeżeniu należy zawrócić model, a jeśli problem występuje nawet w bliskiej odległości zaprzestać latania, zidentyfikować i usunąć problem przed kolejnymi lotami. Przed każdym lotem należy wykonać kontrolę zasięgu, zgodnie z dokumentacją odbiornika.
W trybie sprawdzania zasięgu nadajniki FrSky ograniczają moc trzydzieści razy.
Wiele odbiorników telemetrycznych, poza wysyłaniem RSSI jako jednego z parametrów zwrotnych, pozwala również na odczyt RSSI przez dedykowany do tego port RSSI.
Znakomita większość odbiorników FrSky udostępnia wskazanie RSSI jako sygnał PWM o amplitudzie równej 3.3V, podobny do tego, używanego do sterowania serwomechanizmów. Nie należy jednak mylić amplitudy 3.3V sygnału RSSI PWM, z napięciowym sygnałem RSSI (patrz niżej).
Przebieg RSSI PWM nie jest tak idealny, jak ten używany do sterowania serwomechanizmami (zbocza sygnału nie są idealnie pionowe, zmiany są bardziej płynne), ale zasada działania jest dokładnie taka sama. Szerokość impulsów (wypełnienie) określa wartość RSSI.
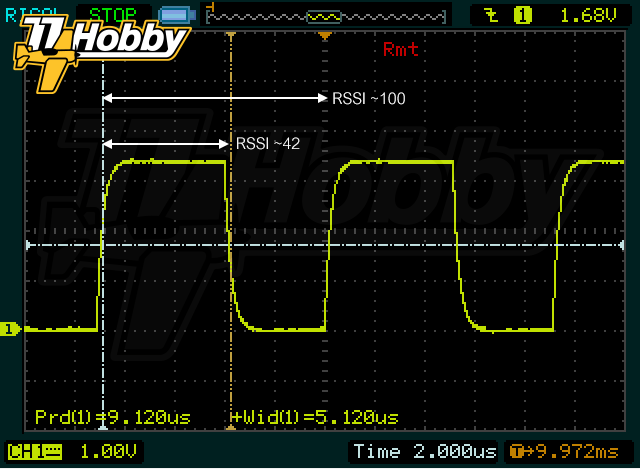
rys. 18: Sygnał RSSI PWM z odbiornika D4R-II.
Na rysunku 18 widać typowy obraz z odbiornika FrSky, wraz z przykładową szerokością impulsu odpowiadającą RSSI = ok. 42, oraz zaznaczoną szerokością odpowiadająca RSSI ok. 100.
Nie wszystkie kontrolery lotu czy OSD potrafią wprost odczytywać wartość RSSI PWM. Niektóre wymagają sygnału RSSI, gdzie poziom RSSI określony jest wartością napięcia stałego, proporcjonalnego do wskazania RSSI. W takim przypadku można zastosować filtr dolnoprzepustowy, który uśredni sygnał PWM zamieniając go na napięcie stałe w żądanym zakresie.
W chwili pisania tego artykułu jedynym odbiornikiem FrSky, podającym RSSI w postaci napięciowej, jest odbiornik dalekiego zasięgu L9R. Przebieg takiego sygnału na oscyloskopie to linia prosta (rysunek 19) i można go także zmierzyć zwykłym multimetrem.
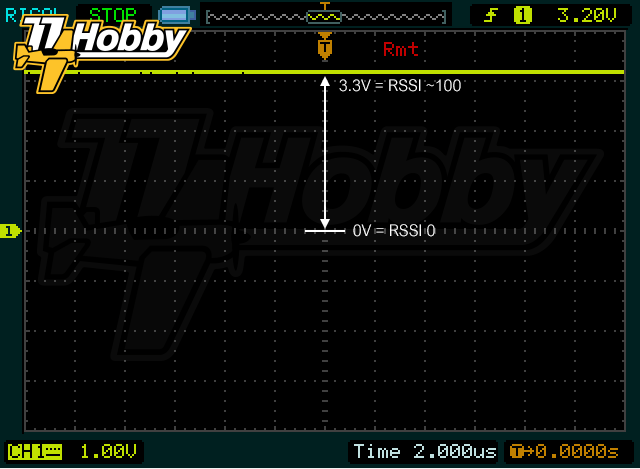
rys. 19: Sygnał RSSI napięciowy z odbiornika L9R.
Sygnał RSSI określany poziomem napięcia bywa także nazywany analogowym, choć jest to nieco mylące, gdyż sygnał PWM jest także sygnałem analogowym, tyle że modulowanym (zmiennym w czasie).
Należy pamiętać, że RSSI jest wskaźnikiem i służy do przybliżonego określenia siły odbieranego sygnału. Tym niemniej jest to doskonałe narzędzie i znakomicie sprawdza się w praktyce. Tak samo jak inne parametry przekazywane przez telemetryczne odbiorniki FrSky, dzięki czemu wielu modelarzy uniknęło przykrych przygód :).
Porty telemetrii analogowej
Szczegółowy opisu portu analogowego zamieściliśmy w dedykowanym artykule Port analogowy odbiorników FrSky.
Uwagi ogólne
FrSky oferuje wiele różnych odbiorników, wyposażonych w porty różnych standardów. Przydatne zestawienie cech odbiorników FrSky, ułatwiające znalezienie najlepszego do danego zastosowania odbiornika, publikujemy w artykule Kompatybilność i cechy odbiorników FrSky ACCST 2.4GHz.
Różna urządzenia mają różne typy gniazd, ułożenia pinów, ich oznaczeń, kierunków, etc. Miniaturowe odbiorniki są często wyposażone w jeden fizyczny port (gniazdo), którego poszczególne piny mają różne funkcje, np. GND, zasilanie, AIN, SPort, etc. Jeszcze inne mają po prostu pady na płytce PCB, do których bezpośrednio przylutowuje się przewody sygnałowe.
Podczas podłączania urządzeń należy zwrócić szczególną uwagę na polaryzację zasilania i generalnie na oznaczenia pinów. Szczególnie, że FrSky nie stosuje jednej konwencji – np. w niektórych odbiornikach piny GND są u dołu obudowy, w innych w rzędzie górnym.
Zwykle wszystkie piny zasilania (VCC) i masy (GND) są ze sobą połączone. Zasilanie można zatem doprowadzić do dowolnego portu. W razie wątpliwości należy sprawdzić dokumentację danego urządzenia.
Nieprawidłowe podłączenie często prowadzi do uszkodzenia urządzenia lub urządzeń i nie jest objęte gwarancją. Dobrą praktyką jest kilkukrotnie sprawdzanie poprawność połączeń w trakcie pracy i jeszcze raz, przed podłączeniem zasilania.